 案例详情
案例详情

 19872700032
19872700032
19872700032
19872700032
 新闻资讯3d建模3d点云扫描
新闻资讯3d建模3d点云扫描 官方公告
官方公告 行业资讯
行业资讯 技术分享3d高斯泼溅乡镇倾斜摄影电站倾斜摄影三维数据采集城市倾斜摄影交通倾斜摄影工厂倾斜摄影校园倾斜摄影景区3d点云扫描园区3d点云扫描园区倾斜摄影装饰品效果图企业/展品3D视频问题列表
技术分享3d高斯泼溅乡镇倾斜摄影电站倾斜摄影三维数据采集城市倾斜摄影交通倾斜摄影工厂倾斜摄影校园倾斜摄影景区3d点云扫描园区3d点云扫描园区倾斜摄影装饰品效果图企业/展品3D视频问题列表 变电站3D建模
变电站3D建模 交通3d点云扫描三维场景建模
交通3d点云扫描三维场景建模 产品3d点云扫描发电厂3d建模光伏3d建模风电场3D建模储能站建模水电站3d建模地产倾斜摄影机房3d建模景区倾斜摄影家具建模设备建模建筑建模产品建模展馆建模爆炸效果图剖面效果图装修效果图建筑效果图鸟瞰效果图
产品3d点云扫描发电厂3d建模光伏3d建模风电场3D建模储能站建模水电站3d建模地产倾斜摄影机房3d建模景区倾斜摄影家具建模设备建模建筑建模产品建模展馆建模爆炸效果图剖面效果图装修效果图建筑效果图鸟瞰效果图 VR校园全景充电桩3d建模3D可视化建模园区建筑建模工业设备建模文化旅游建模电站能源建模工厂车间建模电商三维建模天猫淘宝建模京东AR建模产品3D建模文物3d点云扫描倾斜摄影建模VR线上展会汽车3D展馆VR艺术展馆VR党建展厅VR博物馆精品案例3D可视化建模园区建筑建模工业设备建模变电站3D建模工厂可视化建模电商三维建模阿里躺平建模京东AR建模产品3d建模文物扫描建模倾斜摄影3D可视化建模电站3d点云扫描工厂3d点云扫描360环物拍摄全景VR拍摄3D效果图制作交通运输建模家具效果图产品效果图工厂效果图医疗健康建模医疗设备建模医疗场景建模工业园区建模办公园区建模商业园区建模住宅园区建模教育园区建模物流园区建模制造业3D建模重工业3D建模轻工业3D建模环保业3D建模
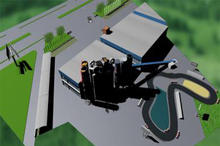
VR校园全景充电桩3d建模3D可视化建模园区建筑建模工业设备建模文化旅游建模电站能源建模工厂车间建模电商三维建模天猫淘宝建模京东AR建模产品3D建模文物3d点云扫描倾斜摄影建模VR线上展会汽车3D展馆VR艺术展馆VR党建展厅VR博物馆精品案例3D可视化建模园区建筑建模工业设备建模变电站3D建模工厂可视化建模电商三维建模阿里躺平建模京东AR建模产品3d建模文物扫描建模倾斜摄影3D可视化建模电站3d点云扫描工厂3d点云扫描360环物拍摄全景VR拍摄3D效果图制作交通运输建模家具效果图产品效果图工厂效果图医疗健康建模医疗设备建模医疗场景建模工业园区建模办公园区建模商业园区建模住宅园区建模教育园区建模物流园区建模制造业3D建模重工业3D建模轻工业3D建模环保业3D建模在当今科技飞速发展的时代,无人机的应用领域不断拓展,从军事侦察到民用的物流配送、环境监测等。然而,当无人机以集群的形式出现时,在复杂环境中的寻路问题成为了一个巨大的挑战。而3D建模可视化技术的出现,犹如一盏明灯,为解决这一难题提供了有效的途径。
无人机集群在复杂环境中面临诸多寻路障碍。复杂的地形,例如山区、森林或者高楼林立的城市地区,存在着大量的障碍物。传统的二维地图难以精确地呈现出这些障碍物的立体结构和高度信息,这使得无人机在飞行过程中很容易发生碰撞危险。此外,多变的气象条件、电磁干扰等因素也会影响无人机的飞行路径规划。
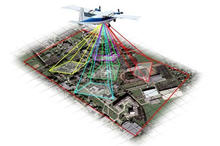
3D建模可视化技术首先为无人机集群提供了精确的环境模型。通过对复杂环境进行3D建模,每一个山丘、每一栋建筑物都能以三维的形式准确呈现。这种精确性让无人机能够提前知晓环境中的各种障碍物的具体位置和形状。就像是给无人机配备了一双慧眼,使它们在飞行前就对即将面临的复杂路况有清晰的认识。
在寻路规划方面,3D建模可视化实现了多维度的路径优化。与二维寻路算法不同,3D环境下的寻路可以综合考虑高度、坡度等因素。例如,在山区环境中,无人机可以根据3D模型规划出一条绕过高耸山峰而不是直接飞越的更安全、更节能的路径。同时,可视化的3D模型能够实时地根据环境变化进行更新。当气象条件改变或者出现新的临时障碍物时,无人机集群可以迅速重新规划路径,避免危险。
从调度的角度来看,3D建模可视化技术增强了对无人机集群的整体把控能力。操作人员可以通过可视化界面直观地看到每一架无人机的位置、飞行方向以及与周围环境的关系。这有助于实现更合理的任务分配,例如让不同性能的无人机执行不同难度的任务。对于紧急情况的处理也更加高效,一旦发现某架无人机即将遭遇危险,操作人员可以迅速下达指令调整其飞行路径。
在安全性方面,3D建模可视化技术极大地提高了无人机集群的飞行安全系数。通过提前模拟飞行路径,能够发现潜在的碰撞风险并及时规避。而且,这种可视化的监控可以让安全监管更加严格,减少因人为失误或者技术故障导致的事故。
在实际应用场景中,比如在城市应急救援中,无人机集群需要快速穿越复杂的城市环境到达事故现场。3D建模可视化技术可以确保无人机在高楼大厦之间安全、高效地寻路飞行,及时将救援物资或者收集到的信息传递回来。

3D建模可视化技术为无人机集群在复杂环境中的寻路难题提供了全面而有效的解决方案。它不仅提高了无人机集群的作业效率,还增强了安全性和可靠性,为无人机在更多复杂环境下的广泛应用奠定了坚实的基础。随着技术的不断发展,相信这一技术将在无人机领域发挥越来越重要的作用。