 案例详情
案例详情

 19872700032
19872700032
19872700032
19872700032
 新闻资讯3d建模3d点云扫描
新闻资讯3d建模3d点云扫描 官方公告
官方公告 行业资讯
行业资讯 技术分享3d高斯泼溅乡镇倾斜摄影电站倾斜摄影三维数据采集城市倾斜摄影交通倾斜摄影工厂倾斜摄影校园倾斜摄影景区3d点云扫描园区3d点云扫描园区倾斜摄影装饰品效果图企业/展品3D视频问题列表
技术分享3d高斯泼溅乡镇倾斜摄影电站倾斜摄影三维数据采集城市倾斜摄影交通倾斜摄影工厂倾斜摄影校园倾斜摄影景区3d点云扫描园区3d点云扫描园区倾斜摄影装饰品效果图企业/展品3D视频问题列表 变电站3D建模
变电站3D建模 交通3d点云扫描三维场景建模
交通3d点云扫描三维场景建模 产品3d点云扫描发电厂3d建模光伏3d建模风电场3D建模储能站建模水电站3d建模地产倾斜摄影机房3d建模景区倾斜摄影家具建模设备建模建筑建模产品建模展馆建模爆炸效果图剖面效果图装修效果图建筑效果图鸟瞰效果图
产品3d点云扫描发电厂3d建模光伏3d建模风电场3D建模储能站建模水电站3d建模地产倾斜摄影机房3d建模景区倾斜摄影家具建模设备建模建筑建模产品建模展馆建模爆炸效果图剖面效果图装修效果图建筑效果图鸟瞰效果图 VR校园全景充电桩3d建模3D可视化建模园区建筑建模工业设备建模文化旅游建模电站能源建模工厂车间建模电商三维建模天猫淘宝建模京东AR建模产品3D建模文物3d点云扫描倾斜摄影建模VR线上展会汽车3D展馆VR艺术展馆VR党建展厅VR博物馆精品案例3D可视化建模园区建筑建模工业设备建模变电站3D建模工厂可视化建模电商三维建模阿里躺平建模京东AR建模产品3d建模文物扫描建模倾斜摄影3D可视化建模电站3d点云扫描工厂3d点云扫描360环物拍摄全景VR拍摄3D效果图制作交通运输建模家具效果图产品效果图工厂效果图医疗健康建模医疗设备建模医疗场景建模工业园区建模办公园区建模商业园区建模住宅园区建模教育园区建模物流园区建模制造业3D建模重工业3D建模轻工业3D建模环保业3D建模
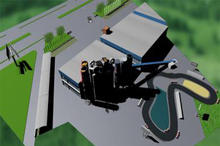
VR校园全景充电桩3d建模3D可视化建模园区建筑建模工业设备建模文化旅游建模电站能源建模工厂车间建模电商三维建模天猫淘宝建模京东AR建模产品3D建模文物3d点云扫描倾斜摄影建模VR线上展会汽车3D展馆VR艺术展馆VR党建展厅VR博物馆精品案例3D可视化建模园区建筑建模工业设备建模变电站3D建模工厂可视化建模电商三维建模阿里躺平建模京东AR建模产品3d建模文物扫描建模倾斜摄影3D可视化建模电站3d点云扫描工厂3d点云扫描360环物拍摄全景VR拍摄3D效果图制作交通运输建模家具效果图产品效果图工厂效果图医疗健康建模医疗设备建模医疗场景建模工业园区建模办公园区建模商业园区建模住宅园区建模教育园区建模物流园区建模制造业3D建模重工业3D建模轻工业3D建模环保业3D建模高速收费站三维扫描点云扫描需遵循严谨的流程,从前期筹备到后期处理,每一个环节都直接影响最终点云数据的精度与可用性。
开展扫描前,需完成设备校准与场地勘察。三维激光扫描仪需提前进行测距与测角精度校准,确保发射的激光束能精准捕捉目标物体的距离与角度信息。同时,要对收费站现场进行全面勘察,明确扫描范围,涵盖收费车道、岗亭、周边护栏及附属设施等,标记出可能影响扫描的障碍物,提前规划扫描站点位置,保证每个站点的扫描范围能有效覆盖目标区域,且相邻站点间存在足够的重叠部分,为后续点云拼接预留基础。
扫描实施阶段,需按照规划的站点依次开展作业。架设扫描仪时,要保证设备水平稳定,避免因振动或倾斜导致扫描数据失真。启动扫描后,仪器会通过发射激光束并接收反射信号,快速获取收费站表面的三维坐标信息,形成离散的点云数据。扫描过程中,需实时监控设备运行状态,确保数据采集连续完整。对于收费站的关键区域,如车道边缘、岗亭细节等,可适当调整扫描参数,提高点云密度,保证细节信息的精准捕捉。
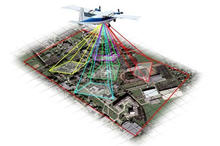
多站点扫描完成后,需进行点云数据的预处理与拼接。首先对原始点云数据进行去噪处理,剔除因环境干扰或设备误差产生的无效点,减少数据冗余。随后,利用相邻站点间的重叠区域,通过算法识别同名点,将不同站点的点云数据对齐到同一坐标系中。拼接过程中,需反复调整参数,优化坐标转换关系,确保拼接后的点云数据无明显错位或断层,整体精度符合要求。

完成拼接后,还需对整合后的点云数据进行分类与优化。通过机器学习算法,将点云数据按照不同地物类型进行分类,区分出道路、建筑、植被等要素,为后续的三维建模或其他应用提供基础。同时,对分类后的点云进行平滑处理,进一步提升数据质量,最终得到能精准反映收费站三维形态的点云数据集